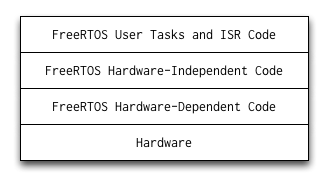
The hardware-independent FreeRTOS layer sits on top of a hardware-dependent layer. This hardware-dependent layer knows how to talk to whatever chip architecture you choose.
Configuration options are selected in FreeRTOSConfig.h by setting various #defines. Clock speed, heap size, mutexes, and API subsets are all configurable in this file, along with many other options. Here are a few examples that set the maximum number of task priority levels, the CPU frequency, the system tick frequency, the minimal stack size and the total heap size:
#define configMAX_PRIORITIES ( ( unsigned portBASE_TYPE ) 5 )
#define configCPU_CLOCK_HZ ( 12000000UL )
#define configTICK_RATE_HZ ( ( portTickType ) 1000 )
#define configMINIMAL_STACK_SIZE ( ( unsigned short ) 100 )
#define configTOTAL_HEAP_SIZE ( ( size_t ) ( 4 * 1024 ) )Hardware-dependent code lives in separate files for each compiler toolchain and CPU architecture. For example, if you’re working with the IAR compiler on an ARM Cortex-M3 chip, the hardware-dependent code lives in the FreeRTOS/Source/portable/IAR/ARM_CM3/ directory.
portmacro.hdeclares all of the hardware-specific functions, whileport.candportasm.scontain all of the actual hardware-dependent code.- The hardware-independent header file
portable.h#include’s the correctportmacro.hfile at compile time. FreeRTOS calls the hardware-specific functions using#definefunctions declared inportmacro.h
Let’s look at an example of how FreeRTOS calls a hardware-dependent function. The hardware-independent file tasks.c frequently needs to enter a critical section of code to prevent preemption.
Entering a critical section happens differently on different architectures, and the hardware-independent tasks.c does not want to have to understand the hardware-dependent details.
So tasks.c calls the global macro portENTER_CRITICAL(), glad to be ignorant of how it actually works.
Assuming we’re using the IAR compiler on an ARM Cortex-M3 chip, FreeRTOS is built with the file FreeRTOS/Source/portable/IAR/ARM_CM3/portmacro.h which defines portENTER_CRITICAL() like this:
#define portENTER_CRITICAL() vPortEnterCritical()vPortEnterCritical() is actually defined in FreeRTOS/Source/portable/IAR/ARM_CM3/port.c. The port.c file is hardware-dependent, and contains code that understands the IAR compiler and the Cortex-M3 chip. vPortEnterCritical() enters the critical section using this hardware-specific knowledge and returns to the hardware-independent tasks.c.
The portmacro.h file also defines an architecture’s basic data types. Data types for basic integer variables, pointers, and the system timer tick data type are defined like this for the IAR compiler on ARM Cortex-M3 chips:
#define portBASE_TYPE long // Basic integer variable type
#define portSTACK_TYPE unsigned long // Pointers to memory locations
typedef unsigned portLONG portTickType; // The system timer tick typeThis method of using data types and functions through thin layers of #defines may seem a bit complicated, but it allows FreeRTOS to be recompiled for a completely different system architecture by changing only the hardware-dependent files.
- And if you want to run FreeRTOS on an architecture it doesn’t currently support, you only have to implement the hardware-dependent functionality which is much smaller than the hardware-independent part of FreeRTOS.
- FreeRTOS implements hardware-dependent functionality with C preprocessor
#definemacros. - It also uses
#definefor plenty of hardware-independent code. For non-embedded applications this frequent use of#defineis a cardinal sin, but in many smaller embedded systems the overhead for calling a function is not worth the advantages that “real” functions offer.