Task Priorities and the Ready List
Each task has a user-assigned priority between 0 (the lowest priority) and the compile-time value of configMAX_PRIORITIES-1 (the highest priority).
For instance, if configMAX_PRIORITIES is set to 5, then FreeRTOS will use 5 priority levels: 0 (lowest priority), 1, 2, 3, and 4 (highest priority).
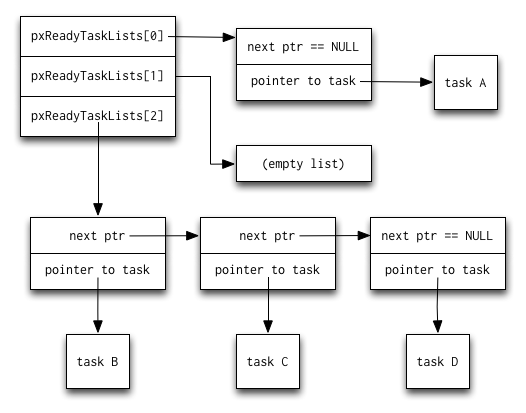
FreeRTOS uses a “ready list” to keep track of all tasks that are currently ready to run. It implements the ready list as an array of task lists like this:
static xList pxReadyTasksLists[ configMAX_PRIORITIES ]; /* Prioritised ready tasks. */pxReadyTasksLists[0] is a list of all ready priority 0 tasks, pxReadyTasksLists[1] is a list of all ready priority 1 tasks, and so on, all the way up to pxReadyTasksLists[configMAX_PRIORITIES-1].
The System Tick
The heartbeat of a FreeRTOS system is called the system tick.
FreeRTOS configures the system to generate a periodic tick interrupt. The user can configure the tick interrupt frequency, which is typically in the millisecond range. Every time the tick interrupt fires, the vTaskSwitchContext() function is called. vTaskSwitchContext() selects the highest-priority ready task and puts it in the pxCurrentTCB variable like this:
/* Find the highest-priority queue that contains ready tasks. */
while( listLIST_IS_EMPTY( &( pxReadyTasksLists[ uxTopReadyPriority ] ) ) )
{
configASSERT( uxTopReadyPriority );
--uxTopReadyPriority;
}
/* listGET_OWNER_OF_NEXT_ENTRY walks through the list, so the tasks of the same
priority get an equal share of the processor time. */
listGET_OWNER_OF_NEXT_ENTRY( pxCurrentTCB, &( pxReadyTasksLists[ uxTopReadyPriority ] ) );- Before the while loop starts,
uxTopReadyPriorityis guaranteed to be greater than or equal to the priority of the highest-priority ready task. - The while() loop starts at priority level
uxTopReadyPriorityand walks down through thepxReadyTasksLists[]array to find the highest-priority level with ready tasks.listGET_OWNER_OF_NEXT_ENTRY()then grabs the next ready task from that priority level’s ready list. - Now
pxCurrentTCBpoints to the highest-priority task, and whenvTaskSwitchContext()returns the hardware-dependent code starts running that task.