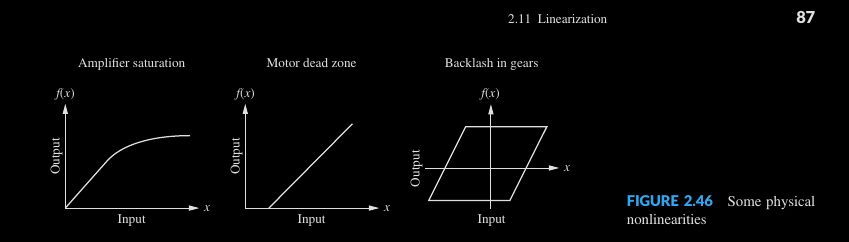
- Some examples of physical nonlinearities:
- An electronic amplifier is linear over a specic range by exhibits the nonlinearity called saturation at high input voltages.
- A motor that does not respond at very low input voltages due to frictional forces exhibits a nonlinearity called dead zone.
- Gears that do not fit tightly exhibit a nonlinearity called backlash.
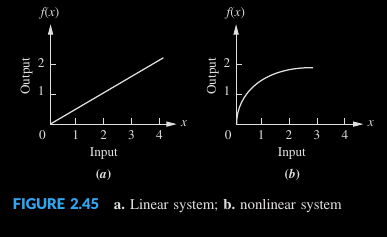
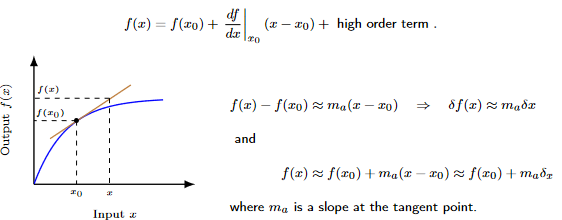
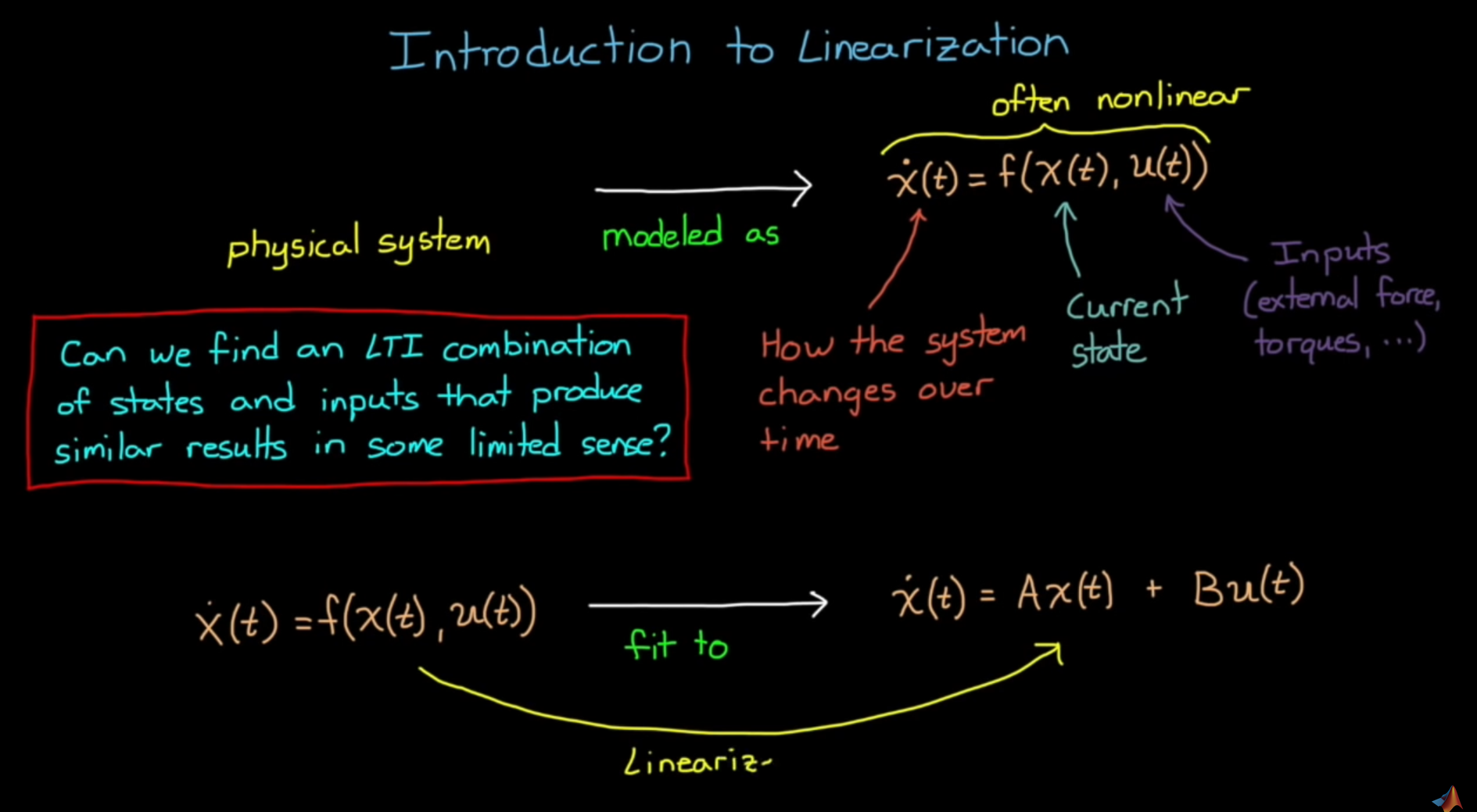
The systems that we consider so far assumed to be linear. However, if there are some nonlinear components are presented, we have to linearize the systems before finding the transfer functions. The linearization steps are:
- Check where is the nonlinear component and write the nonlinear differential equation of the system.
- Linearize the nonlinear part using a
first order Taylor Seriesapproximation at theequilibrium point.