In general, a physical system that can be represented by a linear, time-invariant differential equation can be modeled as a transfer function.
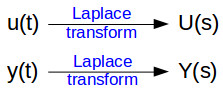
The simplest representation of a system is through Ordinary Differential Equation (ODE). When dealing with ordinary differential equations, the dependent variables are function of a positive real variable t (often time). By applying Laplace’s transform we switch from a function of time to a function of a complex variable s (frequency) and the differential equation becomes an algebraic equation.
To find the transfer function:
- Take the Laplace Transform of the differential equation (with zero initial conditions).
- Recall that differentiation in the time domain is equivalent to multiplication by “s” in the Laplace domain.
Starting with a third order differential equation with x(t) as input and y(t) as output:

Taking the laplace transformation both sides:

The transfer function is then the ratio of output to input and is often called H(s):

EXAMPLE:
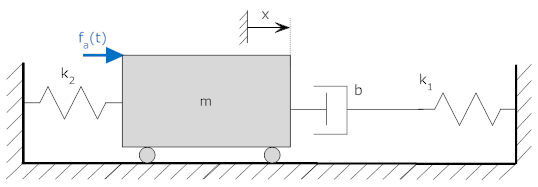
The system is represented by the differential equation:

Take the Laplace Transform of both equations with zero initial conditions (so derivatives in time are replaced by multiplications by “s” in the Laplace domain):

Now solve for the ration of X(s) to Fa(s) (i.e, the ration of output to input). This is the transfer function.
