MULTIPLE SUBSYSTEM REDUCTION (ALGEBRA)
HDL + Control + Signal Processing
TODO book Data-Driven Science and Engineering Machine Learning, Dynamical Systems, and Control
TODO:
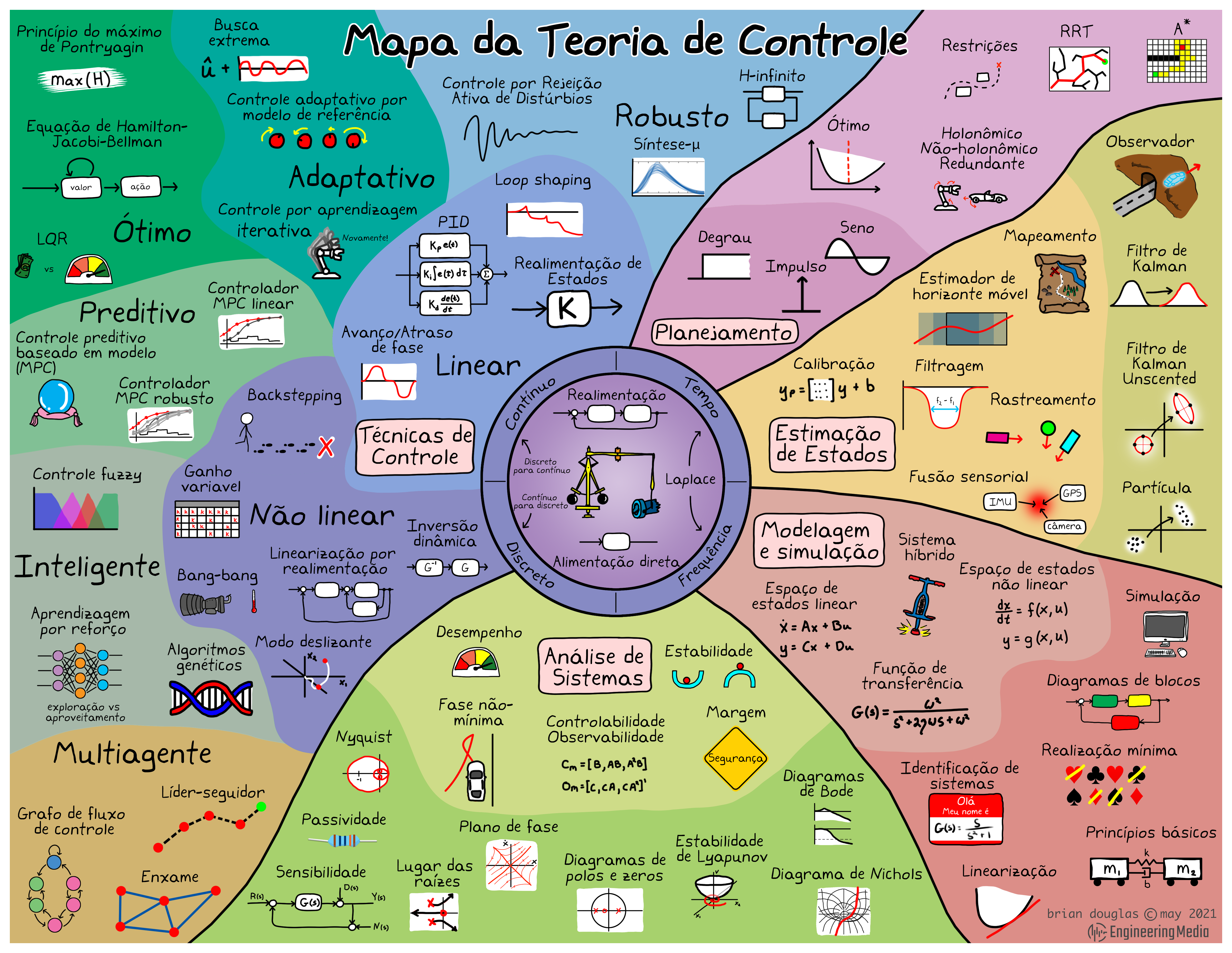
Model Predictive Control (MPC): MPC controllers typically use a linear or nonlinear model of the system to predict future behavior and optimize control actions.
Nonlinear Control: Nonlinear controllers often use techniques such as sliding mode control, backstepping, or feedback linearization.
Adaptive Control: Adaptive controllers can use techniques such as self-tuning, self-organizing, or model reference adaptive control.
Hybrid position/force control: This is a control method that uses both position control and force control to achieve precise movements and interactions with the environment.
Optimal Control: Optimal controllers use mathematical optimization techniques, such as dynamic programming or Pontryagin's minimum principle, to find the best control actions.
Robust Control: Robust controllers often use techniques such as loop shaping or H-infinity control to make the control system robust to disturbances or uncertainties.
Intelligent Control: Intelligent controllers may use techniques such as artificial neural networks, fuzzy logic, or genetic algorithms for improved performance.
Hybrid Control: Hybrid controllers can combine different types of controllers, such as linear and nonlinear controllers, to achieve better performance.
Networked Control Systems: Networked control systems controllers may use techniques such as consensus algorithms, distributed control, or networked predictive control.
Trajectory optimization: this is the process of finding an optimal path for the robot to follow to achieve a specific goal.https://twitter.com/i/status/1633645134934949888
https://www.tutorialspoint.com/control_systems/index.htm
https://controlguru.com/table-of-contents/